
Exoskeleton Arm Brace controlled by Automated (EMG) Mode and Joystick Mode In automated mode, the user’s bicep and tricep muscles control the direction of the exoskeleton arm brace. The benefit of this, is that the user will not have to rely on the joystick device to tell which direction the arm is moving. However, due …
Category: Signal Processing
Includes all posts related to Signal Processing
Apr 06
Updates to the site
Recent Updates to the Site: –Mechanics –User Interface –Circuit Design –Project Summary
Mar 25
PCB Design
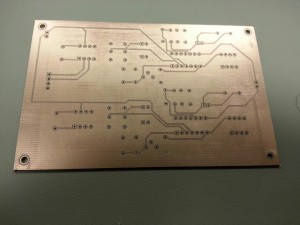
The PCB design was done through KiCAD, with the 3D simulated image shown below. The actual PCB that came from PCB milling machine (front and back images) are shown below. After the PCB came out, rubbing alcohol was used to remove any excess residue. We have already begun to solder the components onto the board …
Feb 26
Exoskeleton Arm controlled by sEMG signals and Joystick Device

In the video above, through 3D printed parts, we were able to construct an exoskeleton prototype that was successfully able to move through the sEMG signals located on the bicep and tricep. The servo used to control the prototype exoskeleton is shown in this link. The actual sEMG signals from the video are shown in …
Feb 08
Video of the bicep and tricep controlling the rotation of a servo
Materials sEMG Circuit x 2 (Bicep and Tricep Inputs) sEMGs + alligator cords Continuous Servo Motor Arduino Mega2560 Serial Connection with the Computer (Arduino IDE + MATLAB) Power Supplies (+9V, -9V, +5V) A serial data connection was established between MATLAB and the Arduino Mega2560 in order to record data into graphs. The data recorded into …
Recent Comments