
Author's posts
Apr 06
Automated (EMG) Mode for the Exoskeleton Arm Brace
Exoskeleton Arm Brace controlled by Automated (EMG) Mode and Joystick Mode In automated mode, the user’s bicep and tricep muscles control the direction of the exoskeleton arm brace. The benefit of this, is that the user will not have to rely on the joystick device to tell which direction the arm is moving. However, due …
Mar 27
Strength Test (3 Trials) with Updated Exoskeleton Design
The three strength test trials are shown below. Trial #1 Trial #2 Trial #3 This test was done using the 320Kg*cm servo motor. A variety of weights up to 8 pounds were used, where the outcome of the experiment was determined through the angle shown on the brace for each weight. Results Trial #1: 70 …
Mar 25
PCB Design
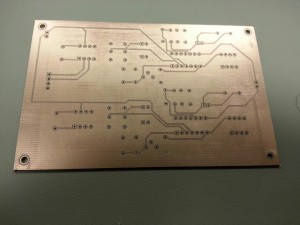
The PCB design was done through KiCAD, with the 3D simulated image shown below. The actual PCB that came from PCB milling machine (front and back images) are shown below. After the PCB came out, rubbing alcohol was used to remove any excess residue. We have already begun to solder the components onto the board …
Mar 21
Adjustable Arm Brace, Force Sensing Resistor (100 pounds)

Through an auction on ebay, we placed a bid and won an adjustable metal arm brace that is used for rehabilitation purposes. To improve on our design, which was previously plastic, we have decided to use this arm brace to support the arm with the large amount of torque provided by the servo motor. The …
Mar 14
Strength Test, New Servo, Power Consumption
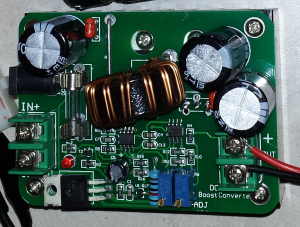
We performed a strength test with the 40Kg*cm servo with 55rpm shown below. After performing the strength test, the maximum amount of weight that the servo could handle at 26cm was 2 pounds. We realized that this servo was incapable of carrying an arm, therefore we decided to upgrade our servo motor. This was a …
Feb 26
Exoskeleton Arm controlled by sEMG signals and Joystick Device

In the video above, through 3D printed parts, we were able to construct an exoskeleton prototype that was successfully able to move through the sEMG signals located on the bicep and tricep. The servo used to control the prototype exoskeleton is shown in this link. The actual sEMG signals from the video are shown in …
Feb 21
Progress Report #1
This is our most up-to-date progress report. Download – Progress Report #1
Feb 08
Video of the bicep and tricep controlling the rotation of a servo
Materials sEMG Circuit x 2 (Bicep and Tricep Inputs) sEMGs + alligator cords Continuous Servo Motor Arduino Mega2560 Serial Connection with the Computer (Arduino IDE + MATLAB) Power Supplies (+9V, -9V, +5V) A serial data connection was established between MATLAB and the Arduino Mega2560 in order to record data into graphs. The data recorded into …
Recent Comments